Che strumento e
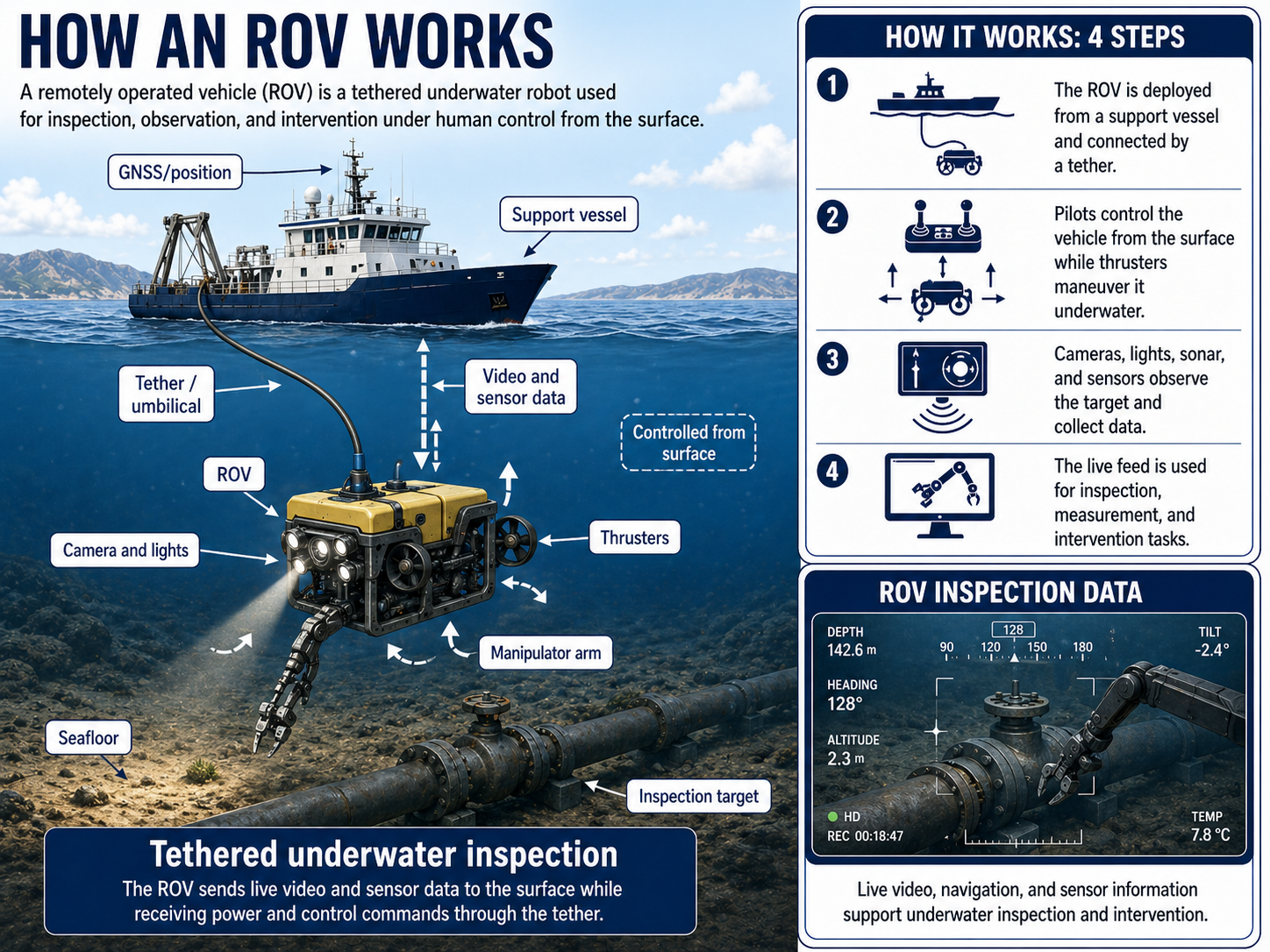
Un ROV, Remotely Operated Vehicle, e un veicolo subacqueo pilotato da superficie tramite cavo ombelicale. Porta telecamere, luci, sensori, sonar, laser di scala e talvolta manipolatori. Nel lavoro idrografico serve a trasformare un'anomalia acustica in evidenza visiva.
La forza del ROV non e soltanto vedere sott'acqua: e documentare in modo ripetibile. Un'ispezione ben fatta collega video, foto, note, coordinate, profondita, progressiva e classificazione dei difetti.

Principio di funzionamento
Il veicolo usa thruster elettrici per muoversi su sei gradi di liberta o su configurazioni piu semplici. L'operatore vede il video in tempo reale e controlla quota, direzione e distanza dal target. Il cavo porta alimentazione, comandi e dati; nei sistemi piu evoluti una TMS gestisce il cavo vicino al fondale.
Per georiferire l'ispezione si possono usare USBL, LBL, DVL, INS, altimetro, profondimetro e sonar imaging. Nei porti e nelle acque torbide il sonar diventa spesso indispensabile per navigare quando la visibilita video e ridotta.
Come si opera
Prima dell'immersione si prepara un piano di ispezione: oggetto da controllare, rotte, quote, punti notevoli, criteri di classificazione e formato del report. Si controllano tenuta, luci, camera, registrazione, bussola, profondimetro, eventuale sonar e sistema di posizionamento.
Durante l'ispezione l'operatore mantiene distanza e velocita costanti, annota eventi, acquisisce fermo immagine e registra eventuali misure. Per banchine e opere verticali si lavora spesso per pannelli o progressive; per condotte e cavi si segue l'asse e si registrano esposizioni, campate libere, danni e attraversamenti.
Marche e classi di ROV
Nel settore si trovano ROV observation class, inspection class e work class. Tra i produttori noti ci sono Saab Seaeye, VideoRay, Blue Robotics, Deep Trekker, Ocean Robotics, Forum Energy Technologies, SMD e Seatronics per integrazioni e noleggi. La scelta dipende da profondita, corrente, carico utile, qualita video e necessita di manipolatori.
I piccoli ROV sono agili e convenienti per porti, invasi e opere costiere; i sistemi work class servono offshore, profondita elevate, correnti importanti e lavori con utensili.
Elaborazione dei dati
Dopo il campo si sincronizzano video, log, posizione e note. Gli eventi vengono classificati, le foto significative estratte, i tratti ispezionati riportati su mappa e le anomalie collegate a coordinate o progressive. Se sono presenti sonar o laser, si possono stimare dimensioni e distanze.
Il valore del dato ROV sta nella tracciabilita. Un video senza log e difficile da usare in progettazione; un log georiferito con immagini e criteri di severita diventa invece una base tecnica per manutenzione, collaudo, contenzioso o monitoraggio nel tempo.
Accuratezza e risultati
L'accuratezza della posizione puo variare molto: da metrica o sub-metrica con USBL ben calibrato e geometria favorevole, fino a incertezze maggiori in porto, vicino a strutture metalliche o con geometria sfavorevole. La misura dimensionale da video richiede scala nota, laser paralleli o fotogrammetria; altrimenti resta una stima visiva.
I risultati sono report fotografici, video indicizzati, mappe eventi, schede difetto, target list, modelli fotogrammetrici locali e raccomandazioni di intervento. Quando integrato con multibeam e side scan, il ROV chiude il ciclo: rilevo, interpreto, verifico.
Approccio professionale: prima si mappa con sonar, poi si manda il ROV sui target davvero interessanti. Si riducono tempi in acqua e si produce una documentazione molto piu robusta.
