Che strumento e
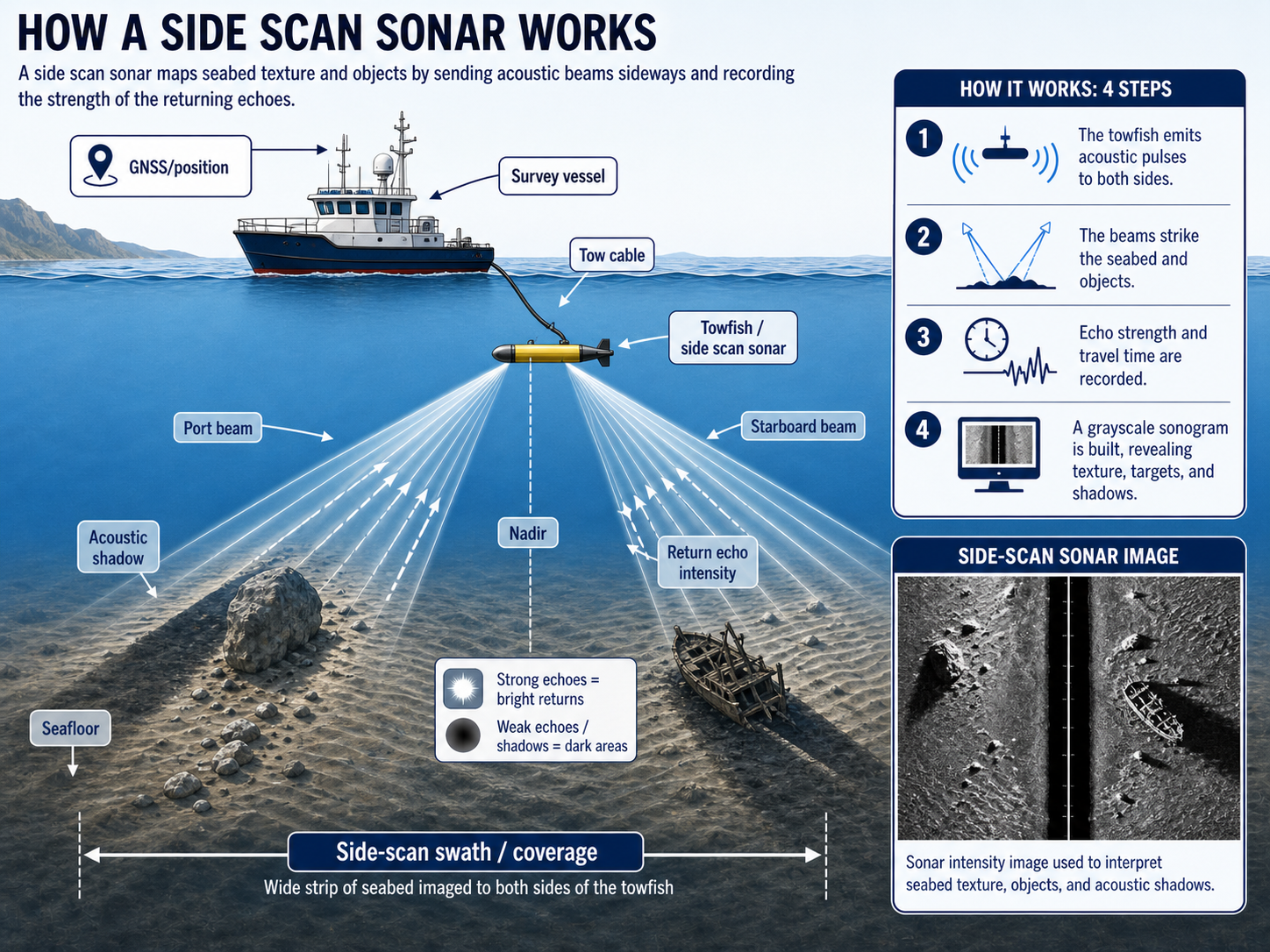
Il side scan sonar e un sonar a scansione laterale: non nasce per misurare direttamente la profondita, ma per produrre un'immagine acustica del fondale. Il sensore, trainato come towfish o montato su scafo, USV, AUV o ROV, invia impulsi verso i lati e registra l'intensita dell'eco.
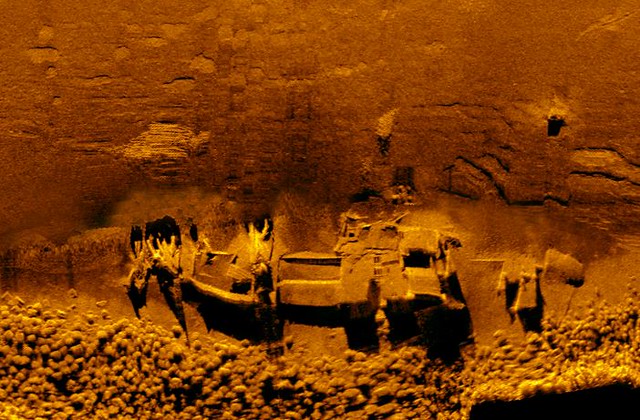
Il risultato assomiglia a una fotografia in bianco e nero, ma va letta con logica acustica: zone chiare indicano ritorni forti, zone scure ritorni deboli o ombre. L'ombra acustica e spesso piu importante dell'oggetto, perche rivela altezza e forma.

Principio di funzionamento
Il sonar emette impulsi acustici a frequenze tipicamente comprese tra poche centinaia di kHz e oltre 1 MHz. Le frequenze piu basse coprono range maggiori ma con meno dettaglio; le frequenze alte danno immagini piu fini ma coprono fasce piu strette e attenuano prima.
Il sistema misura intensita e tempo di ritorno, costruendo una striscia per ogni lato. La colonna d'acqua vicino al sensore appare come una zona centrale senza fondale; dopo la correzione slant range, l'immagine viene proiettata su una distanza orizzontale piu realistica.
Come si opera
In campo si scelgono range laterale, frequenza, quota del towfish e sovrapposizione tra passate. Una quota troppo bassa aumenta il rischio di urti e riduce la copertura; una quota troppo alta peggiora la geometria e rende meno leggibili i target piccoli. La velocita deve restare costante per evitare immagini stirate o compresse.
Il side scan e molto efficace prima dei dragaggi, nelle ricerche di relitti o corpi morti, nella mappatura di praterie e sedimenti, nei controlli di condotte e cavi, e come sensore complementare al multibeam per riconoscere cosa produce una forma batimetrica.
Marche e software diffusi
Tra i marchi piu conosciuti ci sono Klein Marine Systems, EdgeTech, Kongsberg, Teledyne Marine, Marine Sonic, Imagenex e StarFish per applicazioni leggere. Molti sistemi moderni combinano side scan, batimetria interferometrica o sub bottom in un unico towfish.
Per interpretazione e mosaicking si usano spesso SonarWiz, Chesapeake, HYPACK, QPS, CARIS, EIVA e tool GIS. La parte piu specialistica non e solo creare il mosaico: e classificare i contatti con criterio, evitando falsi positivi.
Elaborazione e interpretazione
Si applicano correzione slant range, normalizzazione del segnale, filtraggio del rumore, compensazione della navigazione e, quando serve, mosaicking georiferito. I contatti vengono marcati con posizione, dimensioni apparenti, altezza stimata dall'ombra, immagine di dettaglio e livello di confidenza.
L'interpretazione richiede esperienza: una roccia, una catena, una macchia di posidonia o un relitto piccolo possono produrre segnali simili se cambiano angolo di incidenza, fondale e ombra. Per questo i target importanti vengono spesso verificati con multibeam ad alta risoluzione o ROV.
Accuratezza e risultati
L'accuratezza della posizione dipende da navigazione, layback del towfish, profondita, corrente e quota del sensore. Un side scan trainato puo avere posizione meno precisa del GNSS di superficie se il cavo non viene modellato bene. Un sistema montato su USV, AUV o ROV puo migliorare la stabilita, ma richiede navigazione subacquea adeguata.
I risultati sono mosaici acustici, target list, immagini di contatto, mappe di copertura, classificazione morfologica e indicazioni per ispezioni successive. Il prodotto piu utile e spesso una tabella target chiara: coordinate, dimensioni, immagine, interpretazione e priorita.
Consiglio pratico: nel side scan non bisogna guardare solo il punto brillante. L'ombra, la sua lunghezza e il suo orientamento raccontano se il target sporge dal fondo oppure e solo una variazione di sedimento.